A est une altitude barométrique (par rapport au niveau de la mer), H est une hauteur absolue par rapport au seuil. Les deux sont équivalents.
En fait il faut prendre le problème à l’envers.
une approche de précision (PA ici une approche ILS) a des minimas plus bas qu’une approche de non précision (NPA ici une approche LOC ou MVL), pour des raisons évidentes.
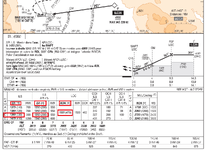
Dans l’exemple on a une PA (ILS) avec des minimas standard cat 1 (200 ft au dessus du seuil) qui sont donnés soit en Hauteur au dessus de l’aéroport (radio altimètre) et donc une DH (hauteur de décision), ou bien donnés en Altitude (altitude de décision) avec une DA. On a les deux valeurs qui sont données pour plus de facilité.
Pour un ILS Cat 1 on rentre la valeur de DA dans la case baro du FMGC pour préparer l’approche. Mais on entre la DH dans la case radio si on fait une approche cat II ou cat III Autoland.
Dans l’exemple donné on a plusieurs types d’ILS et donc plusieurs minimas « Non standard »
1- ILS “standard », avec un taux de montée minimum en cas d’approche interrompue (API ou MACG en engliche) de 2.5%. Normalement en cat 1 on devrait avoir une DH de 200 ft soit une DA de 1260ft (altitude seuil + 200 ft)
Problème, ici on a déterminé que les minimas devaient être supérieurs au standard (330 ft au lieu de 200ft) probalement à cause d’obstacles dans la trouée d’envol en cas de remise de gaz. Cette Trouée d’envol de 2.5% ne ”passait pas “ avec le minimum classique de 200ft pour une Cat 1, donc on a choisi après calcul géométrique une hauteur supérieure de 330 ft. Cette hauteur de 330 ft (DH) est donc ajoutée à l’altitude du seuil pour donner la DA/DH, d’où le double chiffre 1390ft/(330ft) (altitude baro)/(hauteur)
2- ILS avec un taux de montée minimum de 4 % (API 4%): Comme on évite plus vite les obstacles dans la remontée les minimas sont plus bas et sont ceux d’une cat 1 standard de 200ft
Donc 130ft plus bas que la précédente soit DA/DH 1260/(200)
3- ILS cat 2 “non standard“ avec un MACG/API de 4.4% au lieu des 2.5% habituels: minimas cat 2 de 100ft (DH).
Ici on ne parle plus de DA mais juste de DH puisque c’est une hauteur de décision basée sur le radio altimètre et donc plus précise.
4- On a enfin une approche NPA et là ce n’est plus une hauteur/altitude de décision, mais une altitude de descente minimale (MDA).
La MDA a également été déterminée par calcul, c’est une approche moins précise donc minimas plus élevés qu’une PA avec une hauteur de 470 ft soit une altitude de 1520ft au dessus du niveau de la mer.
5- Pour terminer on a une manœuvre à vue Libre (MVL ou Circling) aux minimas encore plus hauts puisqu’on est censés “shooter “ l’approche de précision d’abord (vent arrière) pour arriver à une altitude/hauteur où on aura la piste en visuel (la fameuse MDA), et où on fera à partir de là la manœuvre de circling, cad passage en vent arrière puis en base et en finale tout ça en gardant en tous temps la piste en vue, (d’où le nom de “manœuvre à vue”)
Une hauteur de circuit habituelle en MVL pour un 320/737 est de 1500 ft AGL, ici c’est un peu plus haut pour je ne sais quelle raison, des obstacles isolés ou des montagnes pas loin probsblement.
Conclusion:
On voit donc qu’il faut d’abord faire les calculs de performance atterrissage en fonction des conditions du jour (MTO, poids de l’avion), pour savoir si les exigences de pente de montée en cas d’API peuvent être respectées ou pas, et on choisira ensuite le minima applicable pour l’ILS en fonction…